Прежде чем начать работать над первым роботом нужно сначала ознакомится с содержанием данного самоучителя и уже потом идти в магазин запчастями и начинать сборку робота.
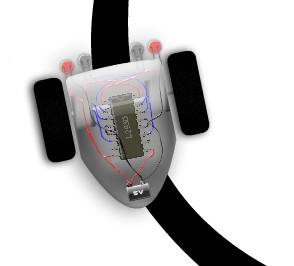
Начнем с самого простого – соберем только половину нашего робота способного реагировать на свет. Соберем схему по рисунку, расположенному ниже:
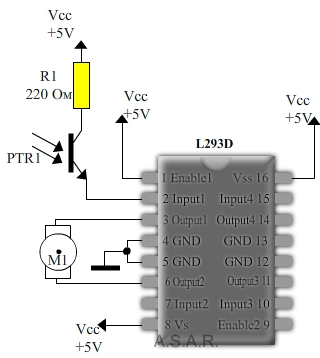
Если вы еще не понимаете как собирать схемы по таким чертежам (хотя вряд ли, чертеж изучают по физике в 8 классе), то обратитесь на форум в основы роботостроения для новичков. Итак, для устранения некоторых вопросов кое-что мы разберем здесь. На схеме L293D мы видим выходы GND – их мы подключаем к минусу (к земле, на англ. яз. – GrouND), все с индексом Vcc подключаем к батарее или аккумулятору (желательно на 5 вольт, так как указано на схеме, но схема универсальна и может работать с напряжением до 9 вольт, но есть возможность перегрева). Также мы видим странный символ со стрелочками и индексом PTR1 (PhotoTRansistor – фототранзистор), найти подходящий фототранзистор сложновато, поэтому легче будет найти фотодиоды серии ФД (хотя они тоже могут не заработать). Если говорить о личном опыте, то я брал ИК-порты прозрачные – удивительно, но они воспринимают свет, видимый человеческому глазу, а не инфракрасный, также покупал фотодиоды серии ФД, с ними ничего не вышло. Немного выше по чертежу – резистор на 220 Ом (тут должно быть все понятно, не вам дак продавцу однозначно). М1 – обычный электромотор. Лучше найти чего помощнее, а еще лучше купить сервомотор (можно найти в интернет магазинах или в магазине электроники), но они дорогие, поэтому альтернативой все-таки будет купить 2 машинки полно-приводные или одну с пультом на проводе (если на пульте 4 кнопки, можно смело покупать, почему сейчас объясню) – а что с ними делать? Значит так, вы их разбираете, далее делите на 2 части. Те части в которых находится мотор с шестереночной передачей (редуктором) вы склеиваете и у вас получается полноприводный авто с двумя моторами на каждую сторону, тогда при повороте у машины один мотор останавливается, а другой продолжает свое движение, за счет этого авто разворачивается по принципу танка. Что касательно машинки с пультом и 4-мя кнопками на нем, то внутри такой машинки уже есть 2 мотора и отработана система танкового поворота. Можно выбрать вариант – купить моторы самому, достать конструктор типа Легко и наваять себе платформу, но тогда у ваших моторов вряд ли хватит мощности для того чтобы съехать с места, хотя возможно у вас получится сотворить нужную передачу (ременную, шестерную и т.д.) для решения данной проблемы, с ременной передачей и конструктором я экспериментировал, ничего из этого не вышло. Ну для успешной сборки этой части урока я все довольно подробно объяснил и разобрал.
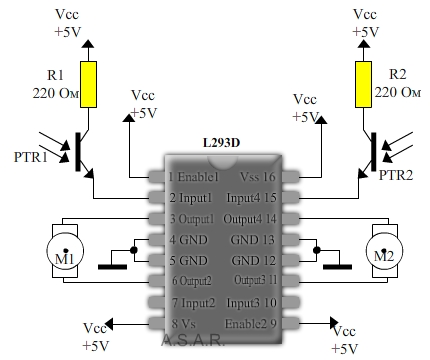
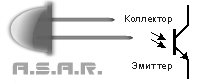
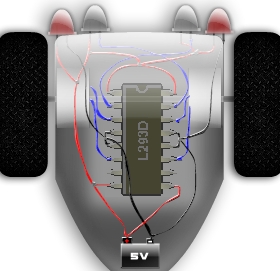
Думаю теперь можно перейти к более сложной части урока (хотя понятие «сложно» весьма относительно). Соберем полностью робота способного реагировать на свет. Для этого соберем схему до конца как показано на рисунке. Тут никаких проблем возникнуть не должно. Хочу упомянуть на счет подключения фотодиодов и фототранзисторов – у них имеется коллектор и эмиттер, причем ножка эмиттера длиннее ножки коллектора. По схеме ножку коллектора (более короткую ножку) мы должны подключить к резистору, а ножку эмиттера к схеме. Если ножки одинаковые по длине, то есть еще один способ определить, где эмиттер, а где коллектор – на ножках в местах, расположенных близко к самому корпусу фотоэлемента, есть выступы. Ножка, на которой выступ больше – эмиттер, другая значит коллектор. Для того, чтобы робот все-таки поворачивал на свет, а не наоборот, то желательно переставить местами фотоэлементы, то есть сделать так, чтобы при попадании света допустим на левый фотоэлемент, у нас вращалось не левое колесо, а правое для выполнения поворота в левую сторону (в сторону источника света).
Если вы все сделаете правильно, то у вас получится отличный робот, способный ездить на свет (например фонарика), вам этого мало? Нет проблем, хотите чтобы он ездил по линии? В чем собственно вопрос, сейчас все будет! Соберите робота по приведенной ниже схеме:
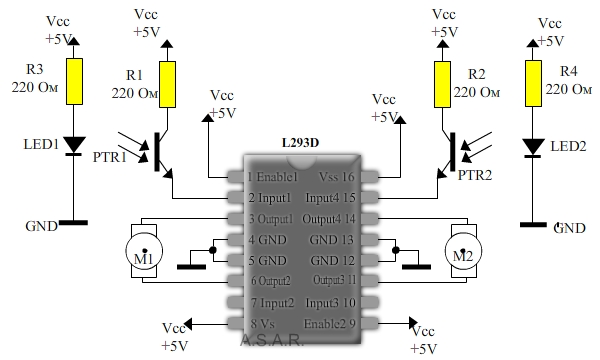
Для того, чтобы робот ехал по линии опустите фотоэлементы и светодиоды вниз. Светодиоды лучше брать ярко-красного цвета. Черная линия должна быть намного уже расстояния между фотоэлементами (я брал 3-4см с учетом расстояния между фотоэлементами – 5-6см), желательно делать линию не из блестящих материалов, лучше нарисовать на белом ватмане черную полосу краской или найти изоленту. Дело в том, что от темных цветов свет отражается плохо, поэтому красный свет попадая на белую поверхность будет отражаться прямо на фотоэлементы, а попав на черный они не будут отражены и свет не попадет в «глаза» роботу.
Автор: AsonD©.
