Начнем пожалуй с Сервоприводов!
Сервопривод (серва, servo или рулевая машинка) – это устройство,
которое отвечает за повороты. Например в радиоуправляемых машинках или
самолётах. Если вам серва нужна для ходовой части робота, то вам надо
разобрать серву, спилить внутри неё ограничитель и вытащить плату. Сама
по себе серва представляет собой прямоугольную коробучку с мотором,
схемой и редуктором внутри и выходным валом, который может
поворачиваться на 60-180 градусов. Угол поворота определяется выходным
сигналом.
На вал надевается рычаг в форме круга, креста или перекладинки для передачи вращающего движения на колесо или что-то др.
• Какие бывают сервоприводы?
Вот пример на фото:


Они бывают разные, но я видел прямоугольные. От самых маленьких до
большик. Между прочем мелкий стоет дороже. Правдо при условие, если в
нём железные шестерёнки. Очень удобно кстати. Такая серва проработает
долго.
Сервопривод - электрическое исполнительное устройство.
Он подключается с помощью трех проводов к управляющему устройству
(драйверу или контроллеру) и источнику питания.
По способу управления сервоприводы бывают аналоговые и цифровые.
Аналоговые управляются аналоговым сигналом, буквально частотой,
параметры которой задаются с помощью широтно–импульсной модуляции или
ШИМ (см.). Цифровые управляются цифровым сигналом, представляющим собой
кодовые команды, передаваемые по последовательному интерфейсу.
Аналоговые сервоприводы намного дешевле цифровых.
Сервоприводы различаются габаритами.
Существуюттак называемые "стандартные" сервоприводы. Это сервы,
габариты и вес которых в общем модельном ряду имеют некотрые средние
значения. Они самые дешевые, в пределах 10...20 долларов. При
уменьшении или увеличении размеров сервопривода в сторону от
"стандартного" цена сервопривода возрастает пропорционально отклонению
размеров. Как и самые маленькие (микросервы), так и самые большие
(супермощные)сервоприводы - это самые дорогие устройства, цена которых
может доходить до сотен долларов.
Сервоприводы различаются материалом шестеренок.
Самые дешевые сервоприводы - с шестернями из пластмассы. Более дорогие
- с одной выходной шестерней из металла. Самые дорогие - с
металлическими шестернями. Соответственно виду материала изменяется
нагрузочная способность сервопривода. Самый слабый сервопривод - с
пластиковыми шестернями, самый мощный - с металлическими.
Сервоприводы различаются типом подшипников
Самые дешевые не имеют подшипников вообще. Пластмассовые шестерни на
пластмассовых валах крутятся в отверстиях пластмассовых пластин,
соединяющих шестерни в единый редуктор. Это самые недолговечные
сервоприводы.
Более дорогие сервоприводы имеют металлическую,
обычно латунную, втулку на выходном валу. Эти вервы более долговечны.
Еще боле дорогие сервы имеют настоящий подшипник на выходном валу, на
который приходится самая большая нагрузка. Подшипник может быть
шариковым или роликовым. Шариковый дешевле, роликовый компактнее и
легче. В самых дорогих сервоприводах на всех (металлических!) шестернях
стоят подшипники. Это - самые долговечные и надежные устройства.
Сервоприводы различаются по толщине.
Она может сильно варьироваться при одинаковых размерах по высоте и
длине. Чем меньше толщина, тем выше цена, поскольку в узком корпусе
труднее разместить шестерёнки.
Источник: http://www.ironfelix.ru/





Вот ссылки на интернет магазины, где их продают (ценники огромны):
http://www.capitalhobbies.com/catalogue/234.html
http://www.robotov.net/shop/servo
http://www.hobbyline.ru/shop/CID_64.html
http://www.hobbyline.ru/shop/CID_111.html
Теперь о самих электромоторах:
ЛСМ СЗЭМО (лаборатория спецмашин) “Мета ЭМ” проектирует и изготавливает
дисковые синхронные вентильные двигатели с возбуждением от постоянных
магнитов (ДСД). ДСД разрабатывались уже в СССР, в частности в одной из
лабораторий ВНИИЭЛЕКТРОМАШ (г. Санкт-Петербург). Работа ЛСМ является
развитием этих работ на современном уровне техники и технологии.


Асинхронный дисковый вентильный электродвигатель - продажа, информация,
разработкаПод дисковым синхронным вентильным двигателем понимают
систему регулируемого электропривода, состоящую из дискового
электродвигателя переменного тока, конструктивно подобного синхронной
машине с возбуждением от постоянных магнитов, и устройства управления,
обеспечивающих коммутацию цепей обмоток электродвигателя в зависимости
от положения ротора двигателя. В этом смысле вентильный двигатель
подобен двигателю постоянного тока, в котором посредством коллекторного
коммутатора подключается тот виток обмотки якоря, который находится под
полюсами возбуждения. Такого рода двигатели не только регулируются по
скорости, но способны преобразовывать параметры электрического сигнала
в параметры вращения вала. В отечественной электротехнике традиционно
такие двигатели назывались исполнительными, а за рубежом -
серводвигателями.
У ДСД, наряду с преимуществами против
асинхронного двигателя, есть существенные преимущества в сравнении с
двигателями постоянного тока:
* высокая надежность по причине отсутствия коллекторного аппарата;
* достаточно высокие напряжения на статоре и, следовательно, мощности
ДСД позволяют применять их в высокоскоростных приводах большой
мощности;
* допустимые высокие темпы изменения тока статора существенны в применениях в высокодинамичных электроприводах.
Технологические процессы разнообразны по своему содержанию и областям
использования. Еще более разнообразны производственные машины и
механизмы, осуществляющие различные технологические процессы. Благодаря
своим хорошим регулировочным качествам ДСД получили широкое применение
для привода различных промышленных машин и механизмов.
1. Дисковая конфигурация наиболее эффективна для высокомоментных электромашин.
2. Уровень “моментности” электромашины характеризуется статическим
моментом, т.е. моментом на валу машины на скорости вращения вала
близкой к нулевой. Статические моменты сопротивления движению возникают
под действием сил сопротивления: силы трения (механизмы передвижения
экскаваторов, кранов, подачи металлорежущих станков и т.д.); силы
сопротивления при обработке металла давлением (прокатка, штамповка,
ковка); силы сопротивления резанию (металлорежущие станки и
экскаваторы); силы тяжести (грузоподъемные и транспортные машины) и
ветра (при передвижении на открытом воздухе). “Высокомоментность”
позволяет использовать эти двигатели без редуктора и создавать
“безредуторный” привод.
3. Асинхронный дисковый вентильный
электродвигатель - продажа, информация, разработкаРазмер - это еще одно
важное достоинство: в отличие от традиционных цилиндрических машин, ДСД
как правило больше в диаметре, но значительно короче. Его компактная,
блинообразная форма позволяет размещать его в устройствах меньшего
габарита. Заказчик имеет возможность изменять по специальному заказу
внешнюю геометрию, посадочные и присоединительные размеры двигателя.
4. Гибкость ДСД позволяет учитывать особые условия использования и выпускать специальные модификации:
* двигатели с полым ротором ( например, серия сервоприводов с полым
ротором для станочных применений, предназначенных для работы в паре с
ШВП (шариковинтовыми парами);
* двигатели с встроенным дисковым редуктором;
* двигатели-лебедки;
* мотор - колесо, в том числе с режимом торможения;
* бескорпусные встраиваемые в механизм двигатели;
* возможность пакетирования дисковых модулей для наращивания общего момента (при спец. требованиях к размерам).
5. Конструкция ДСД позволяет не применять специальных средств
охлаждения в номинальных режимах. Однако, дополнительное воздушное или
водяное охлаждение может повысить выходные характеристики до 10 раз.
6. ДСД могут поставляться как сверхкомпактные высокооборотные
электромашины большой мощности. Так, электродвигатель мощностью 400 кВт
при оборотах 15000 об/мин имеет размер всего 600х600 мм.
7. Для
управления всеми сериями ДСД применяются силовые модули с блоком
микропроцессорного управления. Модули могут работать с разными типами
датчиков угла поворота ротора, Холла, фотодатчиками и
фотоинкрементальными преобразователями. Модули и блоки управления могут
поставляться как в виде встраиваемых плат, так и в виде законченных
приборов разного исполнения.
8. Микропроцессорное управление
позволяет моделировать требуемую нагрузочную характеристику, наиболее
оптимально соответствующую технологическому процессу.
Шаговые двигатели – это электромеханические устройства, преобразующие
сигнал управления в угловое (или линейное) перемещение ротора с
фиксацией его в заданном положении без устройств обратной связи.
Современные шаговые двигатели являются по сути синхронными двигателями
без пусковой обмотки на роторе, что объясняется не асинхронным а
частотным пуском шагового двигателя . Роторы могут быть возбужденными
(активными) и невозбужденными (пассивными).
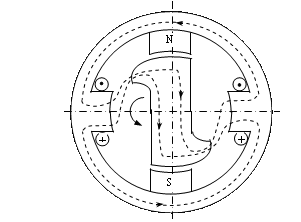
Принцип действия простейшего однофазного шагового двигателя.
Двухполюсный ротор из магнитомягкой стали с клювообразными выступами
помещен в четырехполюсный статор (рис.1). Одна пара полюсов выполнена
из постоянных магнитов, на другой – находится обмотка управления. Пока
тока в обмотках управления нет, ротор ориентируется вдоль постоянных
магнитов и удерживается около них с определенным усилием, которое
определяется магнитным потоком полюсов Фпм. При подаче постоянного
напряжения на обмотку управления возникает магнитный поток Фу примерно
вдвое больший, чем поток постоянных магнитов. Под действием
электромагнитного усилия, создаваемого этим потоком, ротор
поворачивается, преодолевая нагрузочный момент и момент, развиваемый
постоянными магнитами, стремясь занять положение соосное с полюсами
управляющей обмотки. Поворот происходит в сторону клювообразных
выступов, т.к. магнитное сопротивление между статором и ротором в этом
направлении меньше, чем в обратном. Следующий управляющий импульс
отключает напряжение с обмотки управления и ротор поворачивается под
действием потока постоянных магнитов в сторону клювообразных выступов.
Достоинством однофазных шаговых двигателей с постоянными магнитами
является простота конструкции и схемы управления. Для фиксации ротора
при обесточенной обмотке управления не требуется потребление энергии,
угол поворота сохраняет свое значение и при перерывах в питании.
Двигатели этого типа отрабатывают импульсы с частотой до 200-300 Гц. Их
недостатки – низкий КПД и невозможность реверса.
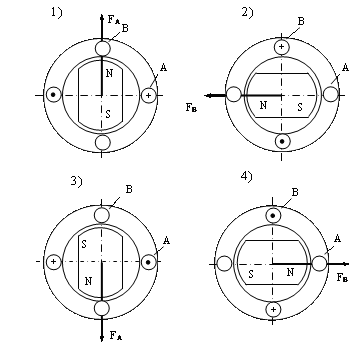
Реверсивные шаговые двигатели. Для осуществления реверса зубцы статора
и ротора шагового двигателя должны быть симметричными (без
клювообразных выступов). Рассмотрим работу двухфазного двухполюсного
шагового двигателя с активным ротором в виде постоянного магнита. Будем
считать, что намагничивающие силы фаз (НС) распределены по
синусоидальному закону. При включении фазы под постоянное напряжение
(условно положительной полярности) вектор НС статора совпадет с осью
фазы А. В результате взаимодействия НС статора с полем постоянного
магнита ротора возникнет синхронизирующий момент Мс = Mmaxsinq, где q -
угол между осью ротора и вектором НС. При отсутствии тормозного момента
ротор займет положение, при котором его ось совпадет с осью фазы А
(рис. 2, первый такт). Если теперь отключить фазу А и включить фазу В,
вектор НС и ротор повернуться на 90о(второй такт на рис. 2). При
включении фазы А на напряжение обратной полярности (третий такт на рис.
2) НС и ротор повернутся еще на 90о и т.д. Если к ротору ШД приложен
момент нагрузки, то при переключении фаз ротор будет отставать от
вектора НС на некоторый угол qн= arcsin(Mн/Mmax).
В зависимости
от типа электронного коммутатора управление шаговым двигателем может
быть: ·одноплярным или разнополярным; ·симметричным или несимметричным;
·потенциальным или импульсным. При однополярном управлении напряжение
каждой фазе изменяется от 0 до +U, а при разнополярном – от -U до +U.
Управление называется симметричным, если в каждом такте коммутации
задействуется одинаковое число обмоток, и несимметричным – если разное.
При потенциальном управлении напряжение на обмотках изменяется только в
моменты поступления управляющих импульсов. При отсутствии управляющего
сигнала обмотка или группа обмоток находятся под напряжением, а
положение ротора фиксируется полем обмоток. При импульсном управлении
напряжение на обмотки подается только на время отработки шаг, после
чего оно снимается и ротор удерживается в заданном положении либо
реактивным моментом, либо внешним фиксирующим устройством.
Магнитоэлектрические шаговые двигатели удается выполнить с шагом до
15°.Дальнейшее уменьшение шага ограничено технологическими трудностями
создания ротора в виде постоянного магнита с числом пар полюсов больше
шести.
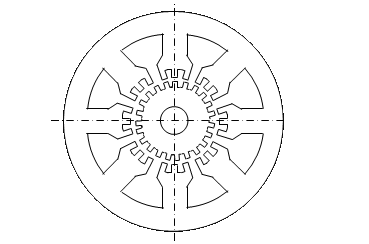
Гораздо более мелкий шаг (до долей градуса) можно получить в
редукторных (индукторных) шаговых двигателей . Индукторные шаговые
двигатели выполняются с числом фаз m = 2-4. Они имеют зубчатый ротор с
равномерно расположенными zp зубцами и гребенчатые зоны статора,
смещенные относительно друг друга на угол 2p/ (mzp) ( рис.3). Число
пазов статора и ротора, их геометрические размеры выбираются такими,
чтобы обеспечить необходимую величину шага и синхронизирующего момента
при заданном виде коммутации токов. Основной особенностью индукторных
двигателей является то, что магнитное поле в зазоре содержит постоянную
и переменную составляющие. Постоянная составляющая поля возбуждается
либо постоянной составляющей тока обмоток управления – у двигателей с
самовозбуждением, либо специальной обмоткой возбуждения – у двигателей
с независимым возбуждением, либо постоянными магнитами – у
магнитоэлектрических двигателей. Переменная составляющая магнитного
поля создается импульсами тока обмоток управления, поступающими от
электронного коммутатора.
Основные параметры и характеристики
шаговых двигателей. Специфика конструкции шаговых двигателей и
многообразие режимов их работы вызывают необходимость оценивать эти
двигатели по следующим параметрам: частоте собственных круговых
колебаний; электромагнитным постоянным времени; коэффициенту
внутреннего демпфирования и характеристикам – предельным механическим и
предельным динамическим. Частота собственных круговых колебаний – это
угловая частота колебаний ротора около устойчивого положения при
отсутствии момента нагрузки. Она является обобщенным параметром,
зависящим от момента инерции J, амплитуды максимального
синхронизирующего момента Mmax, числа пар полюсов p. Период собственных
круговых колебаний, равный 1/w0, может служить внутренним эталоном
времени. Действительно, момент инерции J определяет инерционность
двигателя и механизма, амплитуда максимального синхронизирующего
момента Mmax даетхарактеристику шагового двигателя как преобразователю
энергии, число пар полюсов p определяет степень электромеханической
редукции угла поворота и скорости вращения. Отношение Mmax/J дает
теоретически предельное ускорение ротора шагового двигателя.
Электромагнитная постоянная времени обмоток управления Tэм = L/R
характеризует скорость протекания электромагнитных переходных
процессов. Часто для уменьшения Тэм последовательно с обмоткой
управления включают добавочное сопротивление. Уменьшать постоянную
времени необходимо потому, что чем она больше, тем до меньшего значения
нарастает ток за время импульса напряжения, меньше становится
синхронизирующий момент, а, следовательно, и допустимый момент
сопротивления. Коэффициент внутреннего демпфирования определяется
отношением амплитуды потокосцепления ротора с фазой обмотки статора к
ее активному сопротивлению. Этот параметр относится только к шаговым
двигателям с активным ротором, поскольку его физический смысл
заключается в образовании электромагнитного тормозного момента,
вызванного взаимодействием поля ротора с током статора, наведенным этим
полем и замыкающимся по цепи статор-источник тока. При этом
механическая энергия колеблющегося ротора превращается в электрическую
энергию с последующим рассеиванием ее в теплоту в активных
сопротивлениях обмоток статора. Предельная механическая характеристика
– это зависимость допустимого момента сопротивления от частоты
управляющих импульсов в установившемся режиме работы. С ростом частоты
сказывается запаздывание в нарастании тока, обусловленное
индуктивностью обмоток. При некоторой предельной частоте момент
двигателя становится равным нулю. Предельная динамическая
характеристика – зависимость частоты приемистости от момента
сопротивления и момента инерции нагрузки.
* Шаговый двигатель с редуктором
Режимы работы шаговых двигателей. Характер движения ротора шагового
двигателя определяется частотой и характером изменения управляющих
импульсов. В зависимости от этого различают следующие режимы работы
шаговых двигателей: статический; квазистатический; установившейся;
переходный. Статический режим – это режим, при котором по обмоткам
статора протекает постоянный ток, создающий неподвижное в пространстве
магнитное поле, а ротор не вращается. Под действием нагрузки ротор лишь
отклоняется от положения М = 0 на некоторый угол q. Основной
характеристикой этого режима является зависимость статического
синхронизирующего момента от угла рассогласования M = f(q).
Квазистатический режим – это режим отработки единичных шагов, при
котором переходные процессы от предыдущего такта коммутации полностью
затухли и скорость ротора в начале следующего шага равна нулю. Он
используется в стартстопных, лентопротяжных и других механизмах, в
которых требуется фиксация ротора после каждого шага. Предельная
частота управляющих импульсов, при которой еще соблюдается
квазистатический режим, определяется временем протекания
электромагнитных и особенно электромеханических переходных процессов,
т.е. временем колебаний ротора. Для уменьшения или полного устранения
качаний ротора в конце шага применяют различные приемы. При
принудительном торможении после перевода управляющего импульса с первой
обмотки или группы обмоток на вторую через некоторый промежуток
времени, в течении которого ротор отработает часть шага и запасет
определенное количество кинетической энергии, управляющий импульс вновь
переводится на первую обмотку. На ротор начинает действовать тормозной
момент. При правильном выборе времени и величины тормозящего момента
ротор остановится в конце шага, после чего управляющий импульс
переводится на вторую обмотку и ротор, отработав шаг, фиксируется в
заданном положении практически без колебаний. При естественном
торможении отработка шага происходит в два этапа: на первом этапе
движение ротора осуществляется за счет положительного приращения
момента, возникающего при сдвиге НС статора на часть полного шага; на
втором этапе – за счет кинетической энергии, запасенной ротором при
отрицательном (тормозном) моменте. При достижении ротором заданного
положения НС сдвигается на оставшуюся часть шага и фиксирует ротор в
этом положении. Естественное торможение возможно лишь в тех шаговых
двигателях, у которых полный шаг можно поделить на несколько
элементарных шагов. Повысить предельную частоту квазистатического
режима можно путем увеличения числа обмоток статора или числа тактов
коммутации. Во всех этих случаях снижается угол перемещения и
кинетическая энергия ротора, что уменьшает его склонность к качаниям.
Установившийся режим – это режим, соответствующий постоянной частоте
следования управляющих импульсов. При частоте управляющих импульсов f1,
меньшей частоты собственны колебаний двигателя f0, движение ротора
носит колебательный характер, что увеличивает динамическую ошибку при
отработке заданного перемещения. При малых возмущениях частота
собственных колебаний ротора где Mmax – максимальный статический
синхронизирующий момент; Jp ,Jн- момент инерции ротора и нагрузки,
приведенные к валу двигателя; р –число пар полюсов. При значительных
возмущениях При частоте управляющих импульсов f1 = f0/k, где k – целое
число, возникает явление электромеханического резонанса, которое при
слабом демпфировании колебаний может привести к нарушению нормального
движения ротора и выпадению его из синхронизма. При f1> f0 имеют
место вынужденные колебания с частотой управляющих импульсов; амплитуда
их монотонно уменьшается с увеличением частоты. Для устойчивой работы
шагового двигателя необходимо, чтобы Mн/Mmax < 0,3 - 0,5, a Jн/Jp
<1 -2. Переходный режим - это основной эксплуатационный режим работы
шагового двигателя. Он включает в себя пуск, реверс, торможение,
переход с одной управляющей частоты на другую. Физические процессы в
переходных режимах определяются как параметрами двигателя и его
нагрузки, так и начальными условиями, при которых начинается переходный
процесс. Основное требование к шаговому двигателю в переходных режимах
заключается в отсутствии потери шага, т.е. сохранение синхронизма при
любом характере изменения управляющих импульсов. Пуск шагового
двигателя осуществляется из неподвижного положения ротора, которое он
занимает при установившихся значениях токов в обмотках, путем
скачкообразного
увеличения частоты управляющих импульсов от нуля
до рабочей. При этом ротор вначале отстает от поля, затем, ускорясь,
достигает частоты вращения поля, опережает его и вследствие
отрицательного синхронизирующего момента снова замедляет свое движение.
Вследствие демпфирования колебания скорости вращения быстро затухают,
наступает установившийся режим. Максимальная частота управляющих
импульсов, при которой возможен пуск без потери шага, называется
частотой приемистости fпр.Частота приемистости растет с увеличением
максимального синхронизирующего момента, уменьшением шага, снижением
постоянной времени обмоток, нагрузки и момента инерции. Для современных
ШД fпр = 100-1000 Гц. Торможение шагового двигателя осуществляется
скачкообразным снижение частоты управляющих импульсов от рабочего
значения до нуля. Предельная частота, при которой ротор останавливается
без потери шага, как правило, выше частоты приемистости, что
объясняется внутренним демпфированием – электромагнитным тормозным
моментом,
моментом сопротивления нагрузки и трением в опорах.
Реверс шагового двигателя производится путем изменения
последовательности коммутации токов в обмотках, приводящего к изменению
направления вращения магнитного поля на обратное. Предельная частота
управляющих импульсов, при которой реализуется реверс без потери шага,
всегда меньше частоты приемистости и составляет (0,2-0,5)fпр.
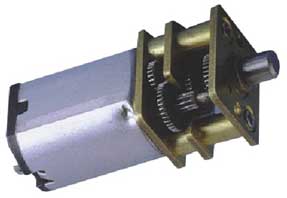 - Мотор - редуктор GM12 с уменьшенным уровнем шума и повышенной плавностью вращения.
- Мотор - редуктор GM12 с уменьшенным уровнем шума и повышенной плавностью вращения.
Передаточное отношение 1/10~1/450.5. Крутящий момент 0,2-1 кг•см.
Скорость вращения 21-872 об/мин. Аудио, видео оборудование, оптические
приборы, бытовая техника.
 - Мотор - редуктор GM17 с уменьшенным уровнем шума и повышенной плавностью вращения
- Мотор - редуктор GM17 с уменьшенным уровнем шума и повышенной плавностью вращения Передаточное отношение 1/4.66~1/808.4. Крутящий момент 0,015-0,5 кг•см.
Скорость вращения 4,5-740 об/мин. Оптические приборы, медицинские
инструменты.
 - Малогабаритный мотор - редуктор GM25 с уменьшенным уровнем шума и повышенной плавностью вращения
- Малогабаритный мотор - редуктор GM25 с уменьшенным уровнем шума и повышенной плавностью вращения 
Передаточное отношение 1/10~1/239.72. Крутящий момент 0,3-0,9 кг•см. Скорость вращения 20-513 об/мин.
Следящий привод видеокамеры, привод мини-факса, специальные инструменты.
 - Малогабаритный мотор - редуктор GM35 с низким уровнем шума и повышенной плавностью вращения
- Малогабаритный мотор - редуктор GM35 с низким уровнем шума и повышенной плавностью вращения 
Передаточное отношение 1/6~1/3000. Крутящий момент 0,4-6 кг•см. Скорость вращения 2-521 об/мин.
Оптические приборы, банкоматы, бытовая техника
 - Высокомоментный компактный мотор - редуктор GM 43
- Высокомоментный компактный мотор - редуктор GM 43 
Передаточное отношение 1/6~1/216. Крутящий момент 2-10 кг•см. Скорость вращения 34-1250 об/мин.
Вращающиеся осветители, игровые автоматы,медицинские инструменты.
